Forward and Back¶
Well done, you have got the motor moving and you can see that it moves from 0° to 180° as you press the button. Now we need to change the code so that the motor moves without human intervention so that our caterpillar can crawl.
New code¶
We are going to move some of the code around. Any code that you put in the forever loop will keep repeating over and over as its name suggests. Change your code as follows:
- Move the code in the
on button A pressedloop to theforeverloop. - Delete the
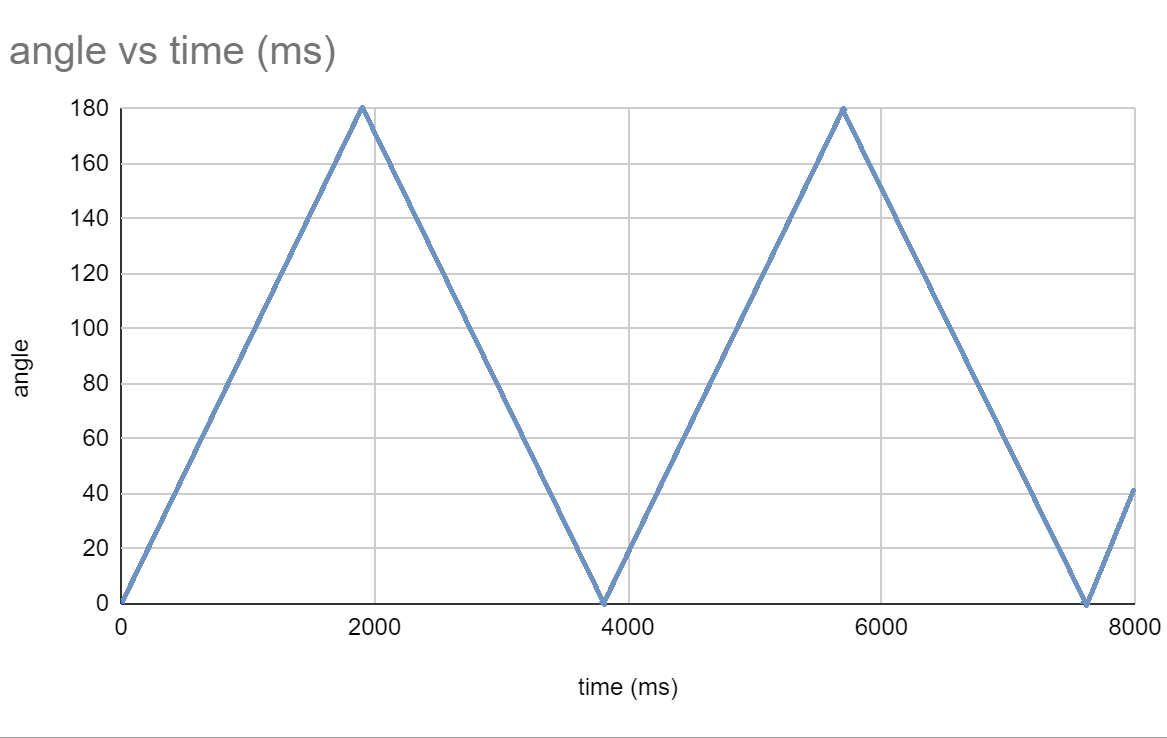
on button A pressedloop. - Take a look at the diagram below, you will see that the motor takes almost 2000 milliseconds to move through 180°. Add a pause after the
anglevariable has been reset to 0. This is so that the micro:bit will wait for the motor to move to angle 0° before moving it again. - Add another pause so that the micro:bit will wait for the servo motor to move each time around the
foreverloop. - Experiment with the duration of the pauses until you have a smooth motor motion.
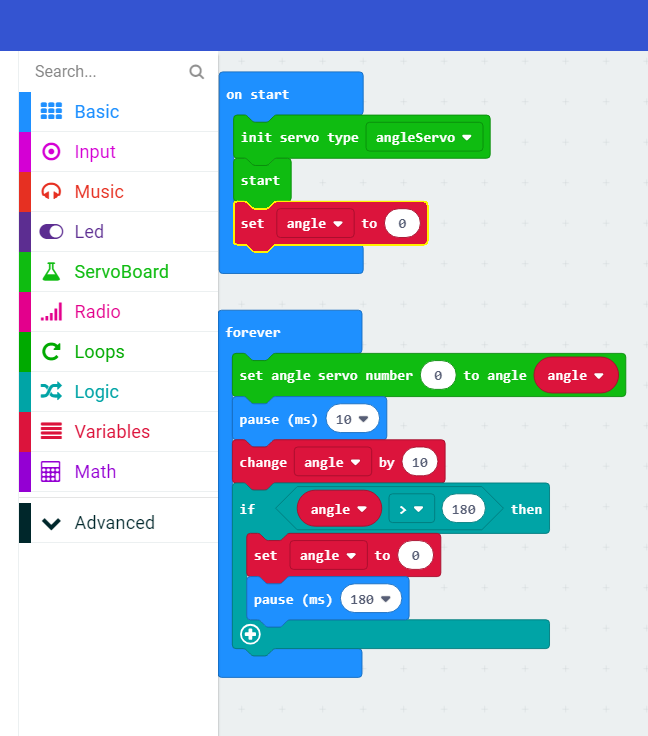
Your code should now look like this:
Experiment¶
Try the program out. Upload your code to the micro:bit. Did it work? Keep experimenting until you are satisfied with the outcome. Remember that when your robot is lying flat on the table, the motors are set to 90°.