Servo Motors¶
Let’s begin by taking a look at the servo motor. There are two types of servo – the first type is one where you can choose an angle to which the arms should rotate; the second goes round and round at a speed you set. We’re going to use the first type shown here:

Futaba S3003 servo motor
Servos are used all over the place in both daily life and in robotics. A servo might retract the tray of a DVD player or might be used in radio controlled vehicles and aeroplanes to control the rudder of a boat, or the ailerons - the moveable flaps on the wings of a plane.
An animation of an airplane rolling via its ailerons (NASA, 2013)
Pulse Width Modulation (PWM)¶
The angle of the arms on the motor is controlled by sending the motor small electrical pulses. This technique is called a pulse width modulation (PWM). Look at the diagram below: a pulse of 0.5 milliseconds (ms) will cause the motor to set the rotor to 0°. A longer pulse of 1.5 ms will set the rotor to 90° and a pulse of 2.5 ms will move the rotor to 180°.
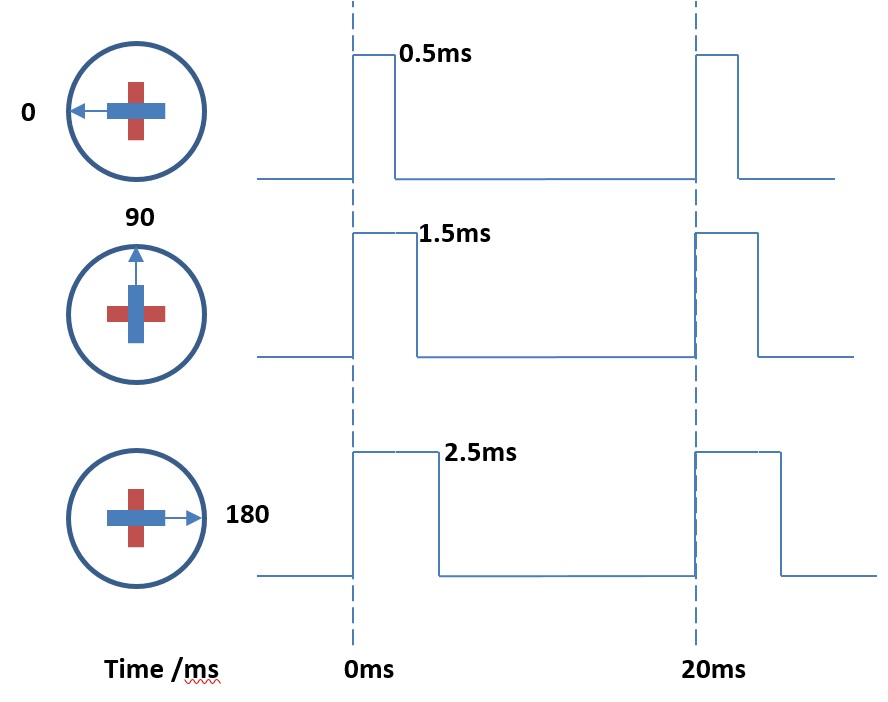
The length of the electrical pulse determines the rotor position.
In the next section, we’ll learn how to connect the motors to the micro:bit.
If you want to learn more about using motors with the micro:bit you can watch this video clip.