More than one motor¶
You are now ready to move more than one motor. Make sure that you have all the remaining motors plugged in to the PWM board and check that you have connected them in the correct orientation.
Servos 1 and 2¶
So far your code just moves the motor plugged into slot 0 on the PWM board. You should add code to move the other two motors as well, like this:
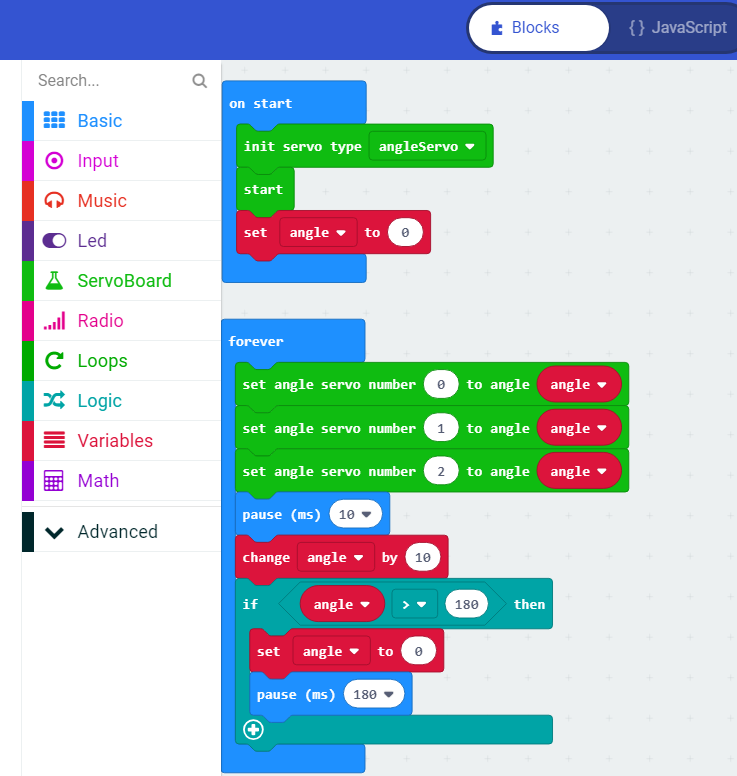
You will notice that all of the motors are moving together at the same angle. This is progress but the caterpillar is not going to move very far!
Is it crawling?¶
Now it’s time for you to experiment. Make two more variables angle1 and angle2 and initialise the new variables in the start loop. Add more code to increase the value of angle1 and angle2 in the forever loop and don’t forget to check whether the value of the angle is greater than 180°.
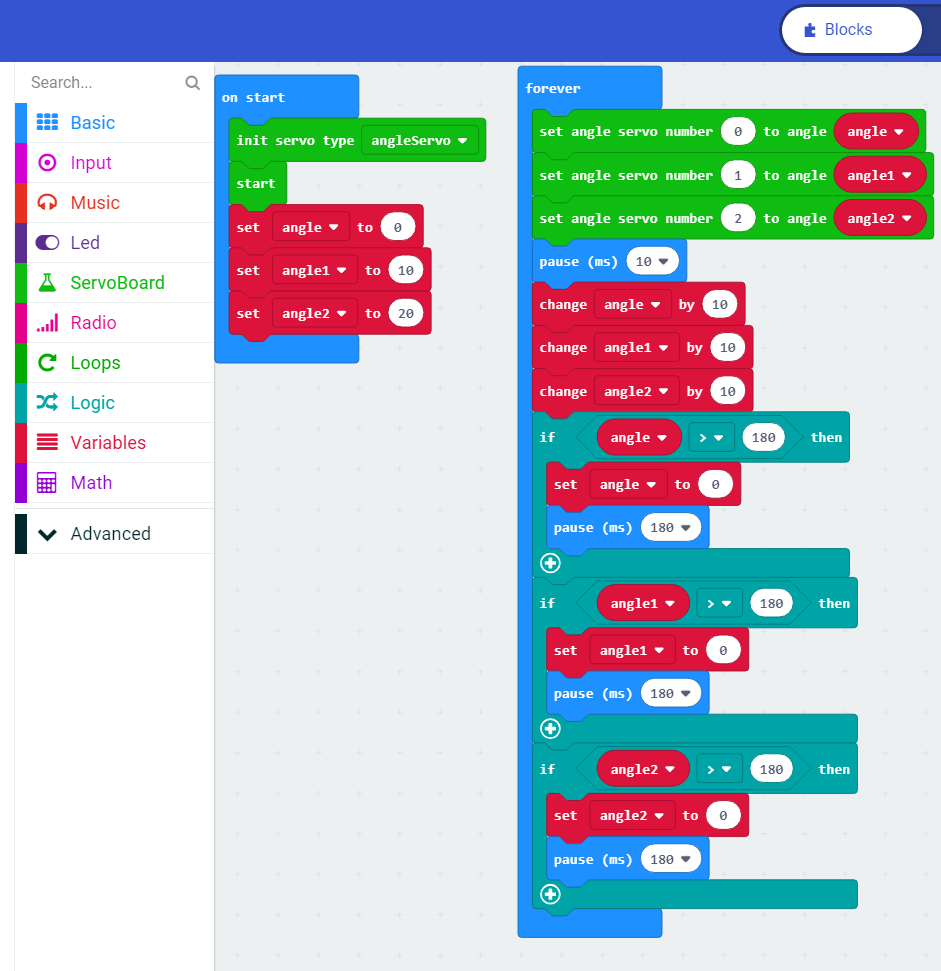
Try it out. Upload your code to the micro:bit. Did it work? Keep experimenting until you are satisfied with the way that the caterpillar crawls.