UCL’s Micro:bit Robotics¶
This project is designed to give students an introduction to robotics with a robot inspired by the natural world. There’s no need to know how to code before diving in but we can assure you that once you have tried it, you won’t want to stop. The project was designed by Professor Stephen Hailes, a robotics expert and dedicated educator. You will use the micro:bit to make the robot move. Professor Stephen Hailes has written a servo motor library for the micro:bit to make this easier.
The robot is a caterpillar (or maybe a snake, depending on the motion style) which was designed by Dr Juan González-Gómez.

Caterpillar robot designed by Dr Juan González-Gómez
Building Your Own Robots¶
Take a look at Dr Gómez’s instructions for making and building the units for the robot. The latest design is here. You can also use the older design, found here.
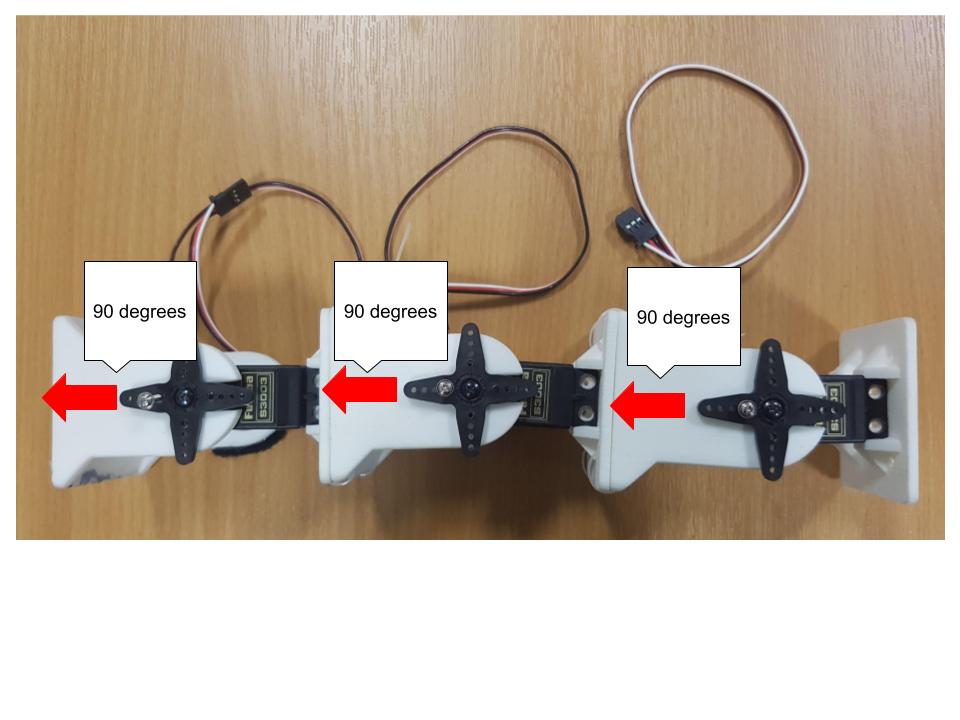
Note: When the robot is flat on the table the servo motors should be set to 90°. You will need to set the motors to a 90 degree angle before attaching the units together.
Contents¶
To download this documentation in pdf, epub or html format, click on the link at the bottom of the sidebar on the left.
If you would like to contribute to the documentation or create your own flavour, go ahead! Use git to fork the repository. The documentation is hosted on ReadTheDocs <https://readthedocs.org>.